Clase 2: Algoritmos de Valores propios¶
Bibliografía de la Clase:
- Numerical Linear Algebra.L.N. Trefethen. Chapter 5: Lecture 25 Overview of Eigenvalue Algorithms
- Introduction to Linear Algebra. Gilbert Strang. Chapter 6 Eigenvalues and Eigenvectors
- Guía profesor Luis Salinas
Alternativa 1: Polinomio característico¶
La primera idea para el cálculo de los valores y vectores propios de una matriz
 es encontrar su polinomio característico, cuyas raíces son los valores
propios, para luego proceder a encontrar sus respectivos vectores propios.
es encontrar su polinomio característico, cuyas raíces son los valores
propios, para luego proceder a encontrar sus respectivos vectores propios.
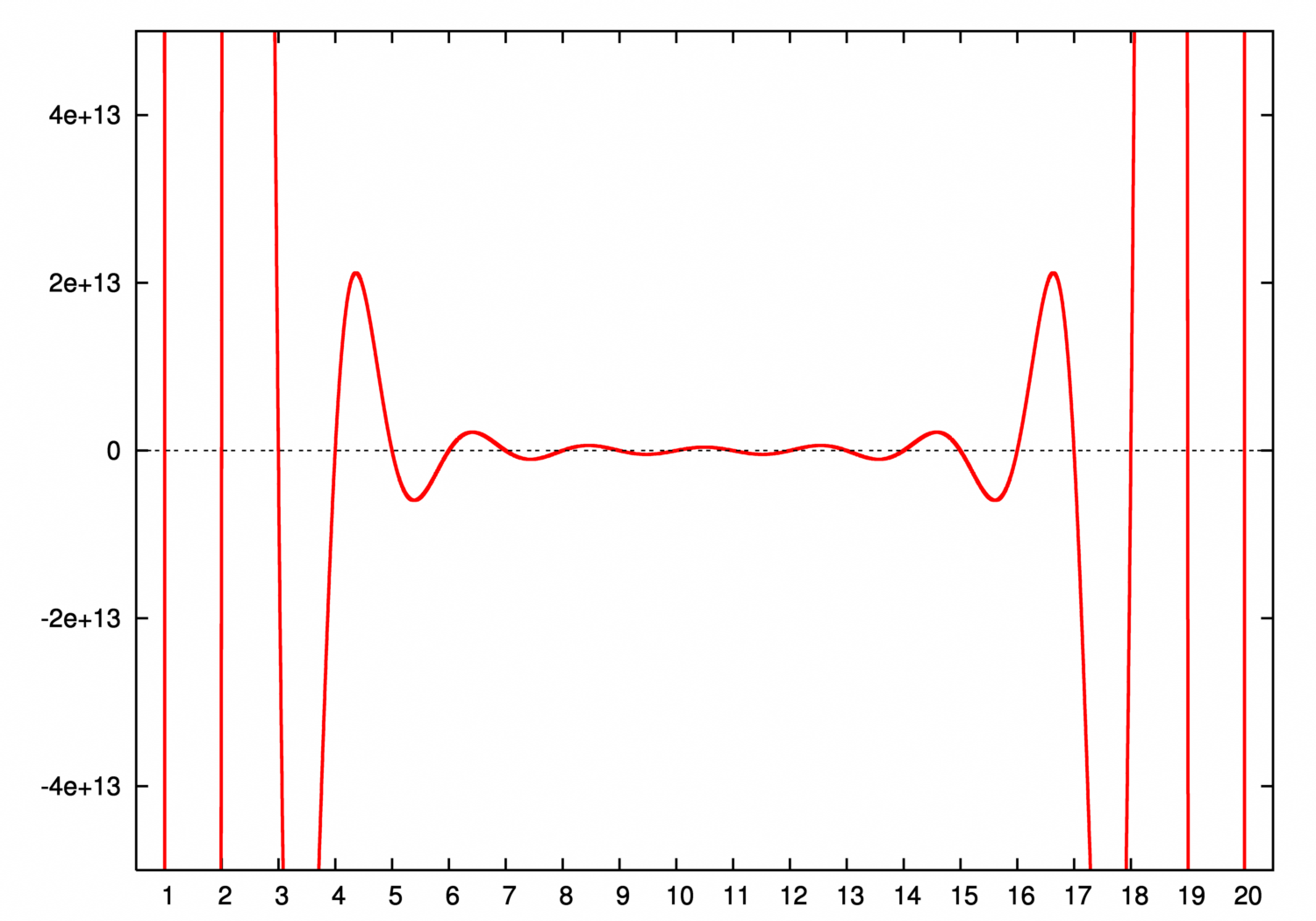
La imagen mostrada corresponde a el polinomio cuyas raíces son  . Se ve claramente que es un problema mal condicionado, debido a
que el polinomio encontrado es muy sensible a sus coeficientes.
. Se ve claramente que es un problema mal condicionado, debido a
que el polinomio encontrado es muy sensible a sus coeficientes.
Es decir, hemos transformado un problema bien condicionado, en uno mal condicionado.
Problema
La búsqueda de raíces en un polinomio, es un problema mal condicionado
(ver Clase Condicionamiento CC1). Por otro lado, se sabe del
Algebra que no existe una fórmula para determinar los ceros de un
polinomio arbitrario de grado  a partir de sus coeficientes.
a partir de sus coeficientes.
Lo anterior muestra que no es posible expresar las raíces de un polinomio como una expresión algebraica y por lo tanto la única forma de obtenerlos es de forma iterativa (con un número infinito de pasos).
Nota
La fórmula para resolver ecuaciones de segundo grado ya era conocida
por los antiguos babilonios. Fibonacci a principios del siglo XIII encontró solución a la ecuación de tercer grado
 y Scipione del Ferro, Niccolò Tartaglia y
Gerolamo Cardano generalizaron la formulación. Ludovico Ferrari,
discípulo de Cardano en el siglo XVI expresó la solución para
ecuaciones de cuarto grado.
y Scipione del Ferro, Niccolò Tartaglia y
Gerolamo Cardano generalizaron la formulación. Ludovico Ferrari,
discípulo de Cardano en el siglo XVI expresó la solución para
ecuaciones de cuarto grado.
Alternativa 2: Método de Iteración de Potencia¶
Este método consiste en construir una secuencia que converge al vector propio
 que corresponde al mayor valor propio en valor absoluto
que corresponde al mayor valor propio en valor absoluto  . La secuencia es la siguiente:
. La secuencia es la siguiente:

¿Porqué funciona?
Si escribimos  como una combinación lineal de los vectores propios
se tiene:
como una combinación lineal de los vectores propios
se tiene:

Al multiplicar sucesivamente por  se tiene que el vector propio es el que predomina la sucesión y por lo
tanto la sucesión converge a él:
se tiene que el vector propio es el que predomina la sucesión y por lo
tanto la sucesión converge a él:
Problemas
El método es muy lento y presenta problemas cuando hay más de un valor
propio con módulo máximo (ej: números complejos  ). Hay
problemas también si se elige un vector de partida
). Hay
problemas también si se elige un vector de partida  que no sea combinación lineal del vector
que no sea combinación lineal del vector  .
.
Otras Alternativas¶
Los mejores algoritmos para valores propios están basados en un principio distinto: calcular factorizaciones de A que revelen sus factores propios.
Una de las factorizaciones que revelan valores propios (ver Clase 1 ) es llamada la Descomposición de Schur, que existe para toda matriz y permite encontrar una triangularización unitaria.
La estrategia para construir estas factorizaciones consiste en aplicar una
secuencia de transformaciones a para introducir ceros donde se requiera.
Descomposición de Schur¶
La descomposición de Schur de una matriz tiene la siguiente
definición:
Factorización de Schur
 donde
donde  es unitaria y
es unitaria y  es una matriz triangular
superior.
es una matriz triangular
superior.
Teorema¶
Toda matriz tiene una descomposición de Schur, incluso las matrices
deficientes.
Demostración¶
Digamos que es un vector propio cualquiera de la matriz con
 como su correspondiente valor propio. Definir la matriz
unitaria
como su correspondiente valor propio. Definir la matriz
unitaria  tenga como primera columna el vector
.
tenga como primera columna el vector
.
![\mathbf{U} = \left[ \begin{array}{c|c|c|c}
\, & \, & \, & \, \\
\, & \, & \, & \, \\
x & u_2 & \cdots & u_m \\
\, & \, & \, & \, \\
\, & \, & \, & \,
\end{array} \right]](_images/math/e46895bff5dfd2556a13848d15283caee014366b.png)
Si ahora construimos  se tiene:
se tiene:
![\mathbf{U}^* \mathbf{A} \mathbf{U} =
\left[ \begin{array}{ccc}
\, & \mathbf{x}^* & \, \\
\hline
\, & \mathbf{u}_2^* & \, \\
\hline
\, & \vdots & \, \\
\hline
\, & \mathbf{u}_m^* & \,
\end{array} \right]
\left[ \begin{array}{c|c|c}
\, & \, & \, \\
\, & \, & \, \\
a_1 & \cdots & a_m \\
\, & \, & \, \\
\, & \, & \,
\end{array} \right]
\left[ \begin{array}{c|c|c|c}
\, & \, & \, & \, \\
\, & \, & \, & \, \\
x & u_2 & \cdots & u_m \\
\, & \, & \, & \, \\
\, & \, & \, & \,
\end{array} \right]](_images/math/a6fd88f4b00c12bd86e2ebd5c989df988fb9befd.png)
Al multiplicar se tiene:
![\mathbf{U}^* \mathbf{A} \mathbf{U} =
\left[ \begin{array}{c|ccc}
\lambda & x^*.A.u_2 & \dots & x^*.A.u_m \\
\hline
0 & u_2^*.A.u_2 & \dots & u_2^*.A.u_m \\
\vdots & \vdots & & \vdots \\
0 & u_m^*.A.u_2 & \dots & u_m^*.A.u_m
\end{array} \right] =
\left[
\begin{array}{c|c}
\lambda & \mathbf{B} \\
\hline
\mathbf{0} & \mathbf{C}
\end{array} \right]](_images/math/cc4abb3ad47e120b10c1299e1e95659b9f5f8b90.png)
Por hipótesis inductiva, la matriz  también tiene descomposición de
Schur, por lo tanto:
también tiene descomposición de
Schur, por lo tanto:

Entonces, como:
![\mathbf{U}^* \mathbf{A} \mathbf{U} =& \left[
\begin{array}{c|c}
\lambda & \mathbf{B} \\
\hline
\mathbf{0} & \mathbf{C}
\end{array} \right] \\
=& \left[
\begin{array}{c|c}
\lambda & \mathbf{B} \\
\hline
\mathbf{0} & \mathbf{V} \mathbf{T} \mathbf{V}^*
\end{array} \right]
=& \left[ \begin{array}{c|c}
1 & \mathbf{0} \\
\hline
\mathbf{0} & \mathbf{V}
\end{array} \right]
\left[ \begin{array}{c|c}
\lambda & \mathbf{BV} \\
\hline
\mathbf{0} & \mathbf{T}
\end{array} \right]
\left[ \begin{array}{c|c}
1 & \mathbf{0} \\
\hline
\mathbf{0} & \mathbf{V}^*
\end{array} \right] \\](_images/math/46f07be38ffb7e05f395d5976ae13654d724fe55.png)
equivalentemente se tiene que:
![\left[ \begin{array}{c|c}
1 & \mathbf{0} \\
\hline
\mathbf{0} & \mathbf{V}^*
\end{array} \right]
\mathbf{U}^* \mathbf{A} \mathbf{U}
\left[ \begin{array}{c|c}
1 & \mathbf{0} \\
\hline
\mathbf{0} & \mathbf{V}
\end{array} \right]
=\left[ \begin{array}{c|c}
\lambda & \mathbf{BV} \\
\hline
\mathbf{0} & \mathbf{T}
\end{array} \right]](_images/math/6840cf2e0dda895841401235916b9e5e01550acd.png)
Ahora sólo basta definir como:
![\mathbf{Q}=\mathbf{U}
\left[ \begin{array}{c|c}
1 & \mathbf{0} \\
\hline
\mathbf{0} & \mathbf{V}
\end{array} \right]](_images/math/9ee7536de2c73d735134d5029136d5118ca7f2b5.png)
Finalmente se tiene que:
![\mathbf{Q}^* \mathbf{A} \mathbf{Q} = \left[ \begin{array}{c|c}
\lambda & \mathbf{BV} \\
\hline
\mathbf{0} & \mathbf{T}
\end{array} \right]](_images/math/76a72c6d75a8142df20e92ca18a77b6e9b7569de.png)
que es de forma triangular superior.
De manera más general la descomposición de Schur se obtiene transformando
con una secuencia de transformaciones del tipo
 de manera que el producto
de manera que el producto

converge a una matriz triangular superior cuando  .
.
Dos fases para la factorización de Schur¶
El procedimiento anterior se realiza generalmente en dos fases:
1. Primero se produce una matriz de Hessenberg
que contiene ceros debajo de la primera subdiagonal.
2. Luego se realiza una iteración infinita de matrices de Hessenber para converger a una matriz triangular superior.
![\mathop{\left[ \begin{array}{ccccc}
\times & \times & \times & \times & \times \\
\times & \times & \times & \times & \times \\
\times & \times & \times & \times & \times \\
\times & \times & \times & \times & \times \\
\times & \times & \times & \times & \times \\
\end{array} \right]}_{\mathbf{A}}
\mathop{\xrightarrow{\hspace*{1cm}}}^{Fase 1}
\mathop{\left[ \begin{array}{c c c c c}
\times & \times & \times & \times & \times \\
\times & \times & \times & \times & \times \\
\, & \times & \times & \times & \times \\
\, & \, & \times & \times & \times \\
\, & \, & \, & \times & \times \\
\end{array} \right]}_{\mathbf{H}}
\mathop{\xrightarrow{\hspace*{1cm}}}^{Fase 2}
\mathop{\left[ \begin{array}{c c c c c}
\times & \times & \times & \times & \times \\
\, & \times & \times & \times & \times \\
\, & \, & \times & \times & \times \\
\, & \, & \, & \times & \times \\
\, & \, & \, & \, & \times \\
\end{array} \right]}_{\mathbf{T}}](_images/math/a27f13bdc899be49ae35786332f8f3137d2add62.png)
Si a es hermitiana, la matriz de Hessenberg resulta tridiagonal y el resultado final es una matriz diagonal que contiene los valores propios:
![\mathop{\left[ \begin{array}{ccccc}
\times & \times & \times & \times & \times \\
\times & \times & \times & \times & \times \\
\times & \times & \times & \times & \times \\
\times & \times & \times & \times & \times \\
\times & \times & \times & \times & \times \\
\end{array} \right]}_{\mathbf{A}=\mathbf{A}^*}
\mathop{\xrightarrow{\hspace*{1cm}}}^{Fase 1}
\mathop{\left[ \begin{array}{c c c c c}
\times & \times & \, & \, & \, \\
\times & \times & \times & \, & \, \\
\, & \times & \times & \times & \, \\
\, & \, & \times & \times & \times \\
\, & \, & \, & \times & \times \\
\end{array} \right]}_{\mathbf{H}}
\mathop{\xrightarrow{\hspace*{1cm}}}^{Fase 2}
\mathop{\left[ \begin{array}{c c c c c}
\times & \, & \, & \, & \, \\
\, & \times & \, & \, & \, \\
\, & \, & \times & \, & \, \\
\, & \, & \, & \times & \, \\
\, & \, & \, & \, & \times \\
\end{array} \right]}_{\mathbf{T}}](_images/math/36d42cbe79bb906807da978b51511c2393150ba8.png)

![]()
Contenidos
Tema anterior
Clase 1: Valores Propios y Vectores Propios
Próximo tema
Clase 3: Reducción de Hessenberg